|
|
|


ION Autonomous Lawnmower Competition 2008
A team of seniors from the College of Engineering and Computer Science at Wright State University competed in the Fifth Annual Robotic Lawnmower Competition, which was sponsored by the Institute of Navigation (ION), the Air Force Research Laboratory Sensors Directorate, and Honeywell. The event was administered by the Dayton Section of the ION. The objective of the competition is for university students to design and operate an autonomous lawnmower to rapidly and accurately mow a field of grass. The competition was held June 5-8, 2008 at Siebenthaler's Beaver Valley Garden Center in Beavercreek, Ohio. Team technical presentations took place on Thursday, June 5. Safety inspections and qualifications were performed on Friday, June 6. The main competition took place on Saturday, June 7. The competition consisted of two categories: the static robotic mowing field and the dynamic robotic mowing field. The static course is a rectangular field with a single static obstacle. The dynamic course was an “L” shaped field with a moving obstacle, a flower bed in the middle of the area, and a portion which was bordered by a picket fence. The Wright State team chose to participate in the more-challenging dynamic course. The multidisciplinary WSU team consisted of three mechanical engineering students led by Dr. Scott Thomas, Associate Professor of Mechanical Engineering, five electrical engineering students led by Dr. Kuldip Rattan, Professor of Electrical Engineering, and three computer engineering students led by Dr. John Gallagher, Associate Professor of Computer Science and Engineering.
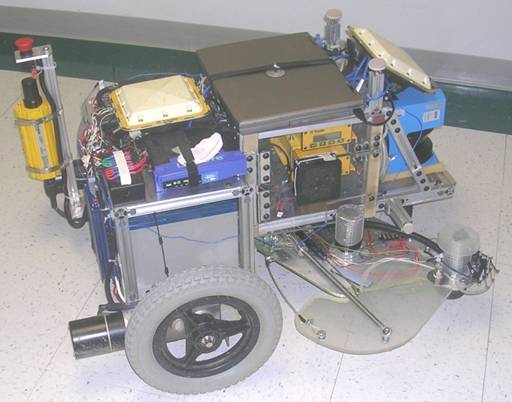
The WSU robotic lawnmower was constructed using 80/20 T-slotted aluminum framing and a ¼ inch aluminum plate for mounting the drive motors. Two electric motors from a wheelchair were used to drive the rear wheels, while a single caster wheel was placed in front, which allowed for a very tight turning radius. A custom-designed aluminum mowing deck was constructed with three staggered mower blades operated by electric motors. An electric string trimmer was also mounted to the mowing deck which could be started when the flower bed or fence were approached. Two automotive batteries powered the drive motors and the mower deck motors, while three smaller batteries were used to operate the on-board electronics. The drive motors were actuated using a RoboteQ motor controller, which was driven by a Dell laptop computer. Three main sensor systems were used to provide input to the computer: A global positioning system (GPS), a laser range finder, and a touch sensor. The GPS system, donated to WSU by Trimble Navigation, Ltd., consisted of three separate antennas and receivers. The first antenna/receiver acted as a base station, which was stationary at all times. The second and third antenna/receiver sets were mounted to the front and rear of the lawnmower, respectively, which provided not only the location of the mower, but also its heading. This was the first time this technique was used in the competition, which proved to be a significant advantage over the rest of the entries. In the past, competitors used a GPS in conjunction with an inertial measurement unit or a digital compass, each of which have problems associated with the accuracy of their heading measurements. Using a base station and a roving station allows for a very precise indication of the location of the roving unit (uncertainty of less than 2 cm). A Sick laser range finder was mounted to the front of the mower. The laser was swept through a 180 degree angle from left to right to provide ranges and locations of the picket fence and the dynamic obstacle, which was a plush toy dog mounted to a remote-controlled electric vehicle driven by the competition judges. The objective of the dynamic obstacle was to ensure that the mower would detect it and not run over it. The touch sensor was used to determine when the mower was in close proximity to the flower bed. The sensor was instrumented with a 4-inch stroke linear potentiometer which was supplied a constant voltage input. When the touch sensor was depressed, the output signal from the potentiometer was used to maintain the string trimmer in a particular range away from the flower bed.
Competing teams came from Case
Western Reserve University, Auburn University, Ohio University, Miami
University, Cedarville University, the University of Evansville, the University
of Waterloo (Canada), and L’Ecole de Technologie Superieure (Canada).
For the second year in a row, the Wright State University team won first place,
which again carried a cash award of $15,000. Last year, the difference between
first and second places was very small, but this year, the Wright State team
score was more than double that of the second place University of Evansville
team. The team members were Adam Webb, Brian Birkmire, Jeffrey Baugher, Paul Tarka,
Nicholas Schwieterman, Kurt Darding, Kimberly Reichelderfer, Joseph Natarian, Jonathon Roach,
Errol Talbot, and Veronica Rathbun.
Videos:
Full
version (143 MB), 5X speed
version (61.5 MB), 15X speed
version (28.0 MB)
{kind=link}
Lawnbot photo 1
{kind=link}
Lawnbot photo 2
{kind=link}